Instructions were to power it up with the learning wires connected. The motor should spin biriefly. Then unplug the wires, and the controller remembers the settings it learned. It worked for me, and two years later, the controller still remembers. What I haven't done is to switch the halls and see if the controller can adapt for that, About Press Copyright Contact us Creators Advertise Developers Terms Privacy Policy & Safety How YouTube works Test new features NFL Sunday Ticket Press Copyright.

Skema Controller Sepeda Listrik Materi Belajar Online
MEMBACA SKEMA CARA KERJA KONTROLLER BLDC MOTOR LISTRIK Secara fungsional kontroller BLDC memiliki fungsi utama menjadikan driver pemutar motor BLDC dan mengatur putarannya. Jika sekilas kita melihat memang terkesan ribet dan sulit kontroller itu. Namun sebenarnya dapat kita pahami dengan sederhana secara mudah. Dalam era kendaraan listrik yang mulai populer saat ini, banyak bermunculan kehadiran berbagai kendaraan listrik mulai dari hoverboard, skuter listrik, se. Dance. ArticlePDF Available. Sistem Pemantauan dan Pengendalian Sepeda Listrik Berbasis Internet of Things. Jurnal Nasional Teknik Elektro dan Teknologi Informasi (JNTETI) 11 (1):53-60. DOI: 10.. 1. Mengetahui perancangan transportasi sepeda listrik dengan rangka mini. 2. Mengetahui seberapa efisien kegunaan sepeda listrik rangka mini. 3. Mengetahui performan dari sepeda listrik rangka mini. 1.5 Manfaat Penelitian 1. Dapat digunakan sebagai rujukan dalam pengembangan sepeda listrik dengan rangka yang lebih besar

Circuit Diagram Of Electric Bike Controller
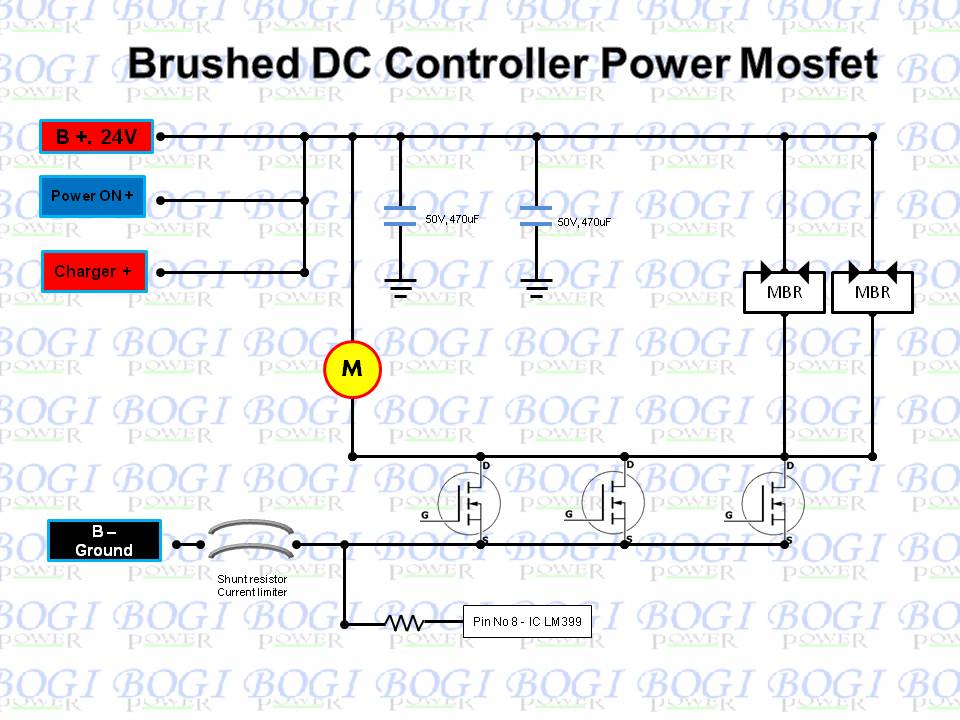
Sistem Kontrol Kecepatan Sepeda Listrik Menggunakan Metode Self-Tuning Parameter PI dengan Metode Logika Fuzzy June 2016 Conference: Seminar Hasil Teknik Elektro Universitas Brawijaya Secara umum, diagram blok kontrol yang digunakan ditunjukkan seperti pada Gbr. 2. Detail hubungan antara mikrokontroler dan controller sepeda listrik ditunjukkan pada Gbr. 1. Pada makalah ini, mikrokontroler yang digunakan adalah ESP32 dan modul GSM yang digunakan adalah SIM800L, dengan board yang digunakan yaitu TTGO T-CALL. Dalam. Controller sepeda listrik dimodifikasi agar dapat terintegrasi dengan ESP32, sedangkan sebagai penggerak sepeda listrik, digunakan motor tipe BLDC dengan tegangan 36 V. Raspberry Pi digunakan. 1. Block power mosfet, MBR dioda dan Motor. Penjelasan: Pada input B+ 24V hanya dicabang menjadi 4 cabang. Ke Motor +, Charger + , key lock + , dan sisanya untuk menerima bias dari MBR dioda dan distabilkan oleh capasitor. Keterangan: 1. kapasitor 50V 470uF 2. Mosfet 3. MBR dioda 4. Shunt resistor
Skema Controller Sepeda Listrik
Wiring Controller Votol untuk Motor BLDC (Sepeda Listrik)Controller Votol yang digunakan adalah controller universal yang dijual di pasaran, bukan seperti ya. Iya, itu dia, diagram controller sepeda listrik! Diagram controller, yang seringkali disebut sebagai "otak" dari sepeda listrik, adalah bagian penting yang mengendalikan segala aktivitas motor elektrik. Nah, di artikel ini kita akan mengupas tuntas mengenai diagram controller ini secara lebih mendalam. Jadi, siapkan dirimu untuk memasuki.
Berikut adalah skema diagram blok kelistrikan dari motor, kontroller, handle gas, baterai dan charger. Standar minimal wiring diagram motor penggerak 1.1 Cara Menyambungkan Controller dan BLDC pada Sepeda Listrik 1.2 Langkah 1: Persiapan Alat dan Bahan 1.3 Langkah 2: Pastikan Kondisi Aman 1.4 Langkah 3: Identifikasi Kabel 1.5 Langkah 4: Hubungkan Kabel 1.6 Langkah 5: Uji Koneksi 2 Tips dalam Menyambungkan Controller dan BLDC pada Sepeda Listrik

Wiring Sepeda Motor Listrik, Ide Terpopuler!
Dari hasil pengujian sepeda listrik dan analisa data, didapatkan daya output untuk menggerakkan sepeda listrik dengan beban 80.6 = 316.6954 Watt, beban 85.6 kg = 303.7732 Watt, beban 90.6 kg = 294. Driver Kontroller. Motor BLDC. Sensor Hall. Gambar 2.1 Blog diagram sistem. Gambar 2.2 Flow chart sistem. 3. Hasil dan Analisis. Pengujian dilakukan untuk mengetahuihasil rancangan dari sistem yang dibuat. Pengujian yang dilakukan ada dua tahapan penting antara lain pengujian perangkat keras dan perangkat lunak.
