Mit der R+V-Auslandsreise-Krankenversicherung gehen Sie auf Reisen kein Risiko ein. Auch im Skiurlaub. Ab 10,80 EUR pro Jahr. Zur Auslandsreise-Krankenversicherung Beitrag berechnen Hardwareversicherung Schutz für Computer und Co. Der Top-Elektronikschutz für alle PCs, Laptops, Spielekonsolen inklusive Originalzubehör und nachgerüstetem Zubehör. What is an RUV? Thor Motorcoach An RUV is a brilliant combination of a sports utility vehicle (SUV) and a recreational vehicle (RV). They're smaller in size, and smoother to drive than other types of motorhomes, but the inside is still spacious enough to accommodate the whole family. DON'T MISS OUT ON DO IT YOURSELF UPDATES
Solved Find the fundamental vector product for r(u, v) =
#ThorMotorCoach #VegasRV #RUVGreat adventures all start somewhere. Why not start yours in a Thor Vegas R.U.V. It's fully equipped and easy to drive. If a C. derivations of such models for constant-velocity problems in a variety of 2D polar and r-u coordinates systems and in 3D spherical and r-u-v coordinate systems, sparing tedious derivations for simple tracking problems. The conversions for r-u and r-u-v coordinate systems do not appear to have been previously published. The normal unit vector will be n^(x, y, z) =n^(φ(u, v)) = φu(u, v) ×φv(u, v) ∥φu(u, v) ×φv(u, v)∥ n ^ ( x, y, z) = n ^ ( φ ( u, v)) = φ u ( u, v) × φ v ( u, v) ‖ φ u ( u, v) × φ v ( u, v) ‖ but if you use the same parameterization to transform the surface integral to a 2d integral you get Figure 16.6.6: The simplest parameterization of the graph of a function is ⇀ r(x, y) = x, y, f(x, y) . Let's now generalize the notions of smoothness and regularity to a parametric surface. Recall that curve parameterization ⇀ r(t), a ≤ t ≤ b is regular (or smooth) if ⇀ r ′ (t) ≠ ⇀ 0 for all t in [a, b].

R.U.V. Rover Utility Vehicle Overview Utility vehicles, Lego space, Classic space
Suppose that r( u,v) is a regular parametrization of a surface. Since the crossproduct r u ×r v is orthogonal to both r u and r v, the vector r u ×r v is normal to the surface at r( u,v) . It follows that the unit vector Standard Parameterized Surfaces Planes The plane through a point with has parametric equation r(u, v) = r0 + uu + vv, u, v 2 R The grid lines are parallel to u, v. Equivalent vector. The blue lines in the picture are the grid lines with u = 0, u = 1 and u = 2 respectively. The orange lines are v = 0, v = 1 and v = 2. The problem of tracking with very long range radars is studied in this paper. First, the measurement conversion from a radar's r-u-v coordinate system to the Cartesian coordinate system is discussed. De nition: If the rst parameter uis kept constant, then v7!~r(u;v) is a curve on the surface. Similarly, if vis constant, then u7!~r(u;v) traces a curve the surface. These curves are called grid curves.
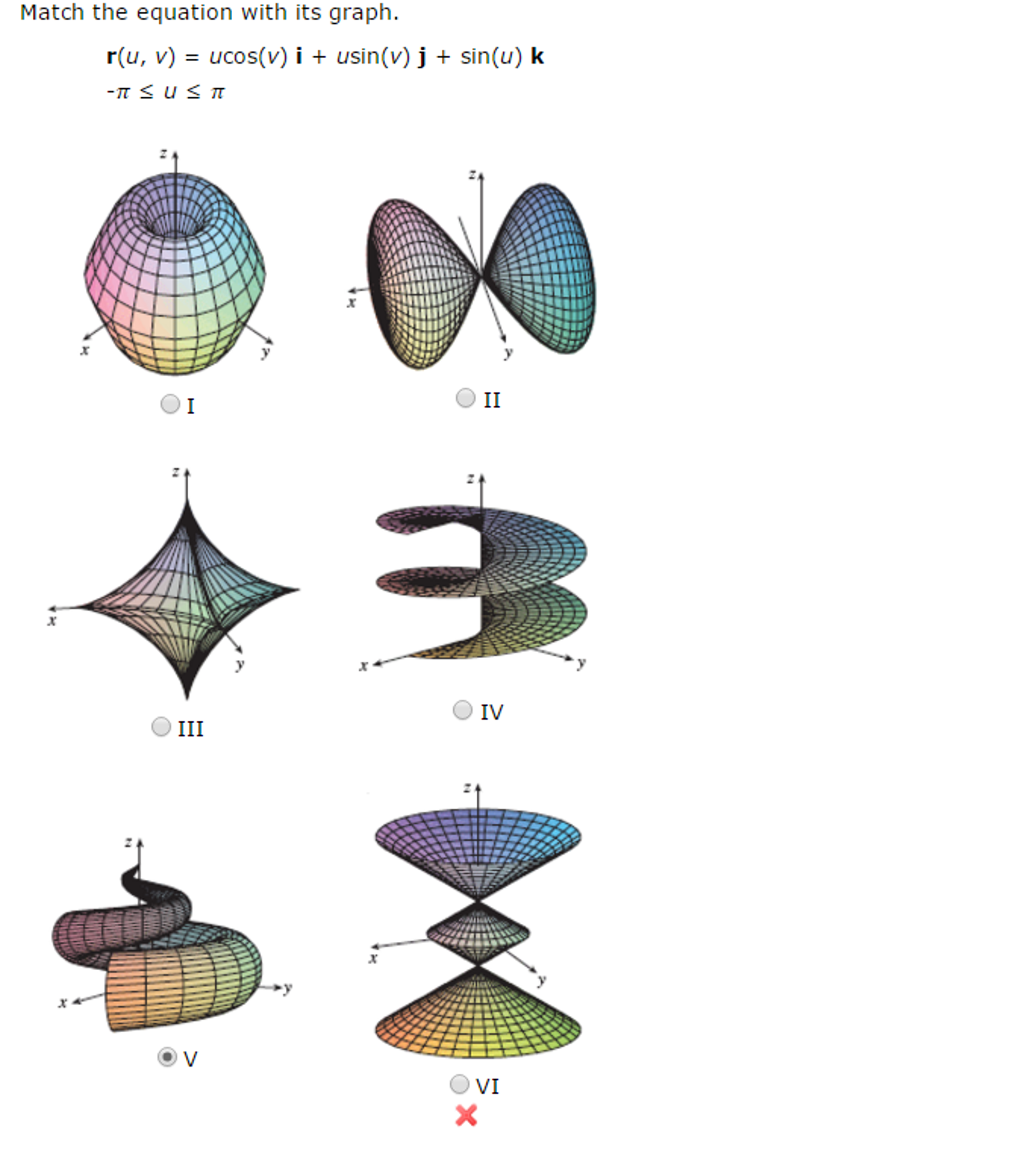
Solved Match the equation with its graph. r(u, v) = u
Electric power can be expressed as P = electrical power (watts, W) The power consumed in the electrical circuit above can be calculated as P = (12 volts) / (18 ohm) electric light bulb is connected to a supply. The current flowing can be calculated by reorganizing I = P / U = (100 W) / (230 V) 0.43 The resistance can be calculated by reorganizing Example 16.6. 1: Consider the function r ( u, v) = v cos u, v sin u, v . For a fixed value of v, as u varies from 0 to 2 π, this traces a circle of radius v at height v above the x - y plane. Put lots and lots of these together,and they form a cone, as in Figure 16.6.1. Figure 16.6.1.
The parameterized surface is a vector valued function r ( u, v) of two variables, whether written in ijk vector notation or as an ordered triple of functions of u and v. Since each of the variables u and v ranges over an interval, the domain for r ( u, v) is a coordinate rectangle, say [ a, b ] x [ c, d ], in the uv -plane. De nition 1. A parametrization is a function from a domain D in the uv plane into R3, written as ~r(u; v) = hx(u; v); y(u; v); z(u; v)i where x = x(u; v), y = y(u; v) and z = z(u; v) are real valued continuous functions (usually di erentiable, and often with additional assumptions). Those three real valued functions are called parametric equations.
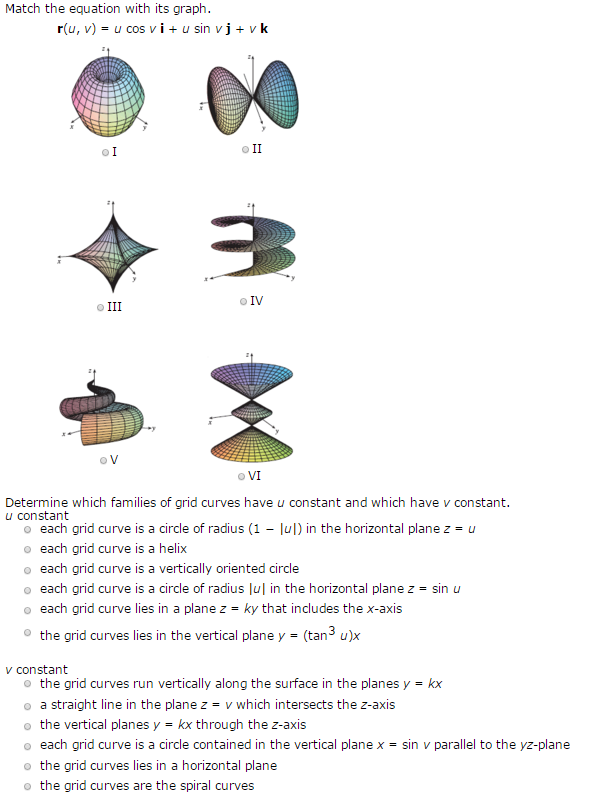
Match The Equation With Its Graph. R(u, V) = U Cos...
by Theorem 1.13 in Section 1.4. Thus, the total surface area S of Σ is approximately the sum of all the quantities ‖ ∂ r ∂ u × ∂ r ∂ v‖ ∆ u ∆ v, summed over the rectangles in R. Taking the limit of that sum as the diagonal of the largest rectangle goes to 0 gives. S = ∬ R ‖ ∂ r ∂ u × ∂ r ∂ v‖dudv. In this section we introduce the idea of a surface integral. With surface integrals we will be integrating over the surface of a solid. In other words, the variables will always be on the surface of the solid and will never come from inside the solid itself. Also, in this section we will be working with the first kind of surface integrals we'll be looking at in this chapter : surface.
