Step 1: Parts and Tools The following parts and tools are required to make this project. The total cost including linkit one was around $150 or 9000INR however the value is not very accurate. If you can make a cheap base for the robot, the cost can be reduced to $100. The parts can be obtained from any electronics online store. Parts: Introduction In 1993, Mackworth proposed the idea of a robot soccer game, which promotes the full integration of the research into artificial intelligence and robotics [ 1 ]. A series of robot soccer games and symposiums are held by two international associations: RoboCup and FIRA [ 2 - 5 ].
Buy Raptor Soccer Robot Kit at the Best Price in India at Robu.in
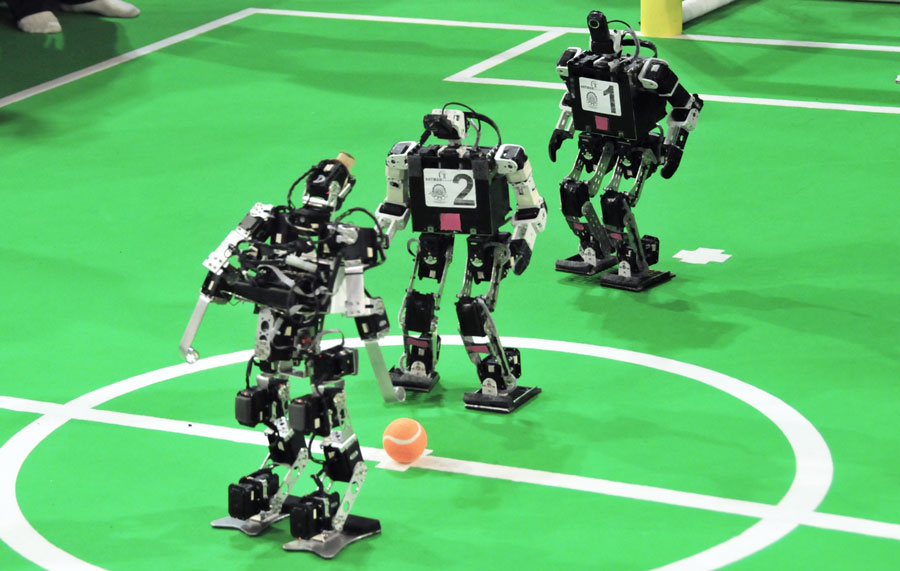
Installation Instructions Install (Windows) » Install (Linux) » Open-source low-cost hardware The kit features robots including three omnidirectional wheels, a solenoid kicker and Bluetooth communication. All parts, 3D models and electronics are documented here and can be built from scratch. A four-legged robotic system for playing soccer on various terrains "DribbleBot" can maneuver a soccer ball on landscapes such as sand, gravel, mud, and snow, using reinforcement learning to adapt to varying ball dynamics. Watch Video Rachel Gordon | MIT CSAIL Publication Date April 3, 2023 Press Inquiries Caption The main features of this system are the following: (i) real-time operation in computationally constrained humanoid robots, and (ii) the ability to detect the ball, the pose of the robot players, as well as the goals, lines and other key field features robustly. Lesson 2: Manipulators. In this Lesson, you will learn about passive and active manipulators and intake design, in order to iterate on your robot design and compete in a One-on-One Robot Soccer challenge! Lesson 3: Robot Soccer Competition. In this Lesson, you will apply your learning from the previous Lesson to compete in the Robot Soccer.

Buy Raptor Soccer Robot Kit at the Best Price in India at Robu.in
Purpose - The purpose of this paper is to design intelligent robots operating in such dynamic environments like the RoboCup Middle-Size League (MSL). In the RoboCup MSL, two teams of five. The paper study robot developm 10 years in the area of mechanical and soccer in order to present the best per design. This paper reviews about develo soccer based on sub categories of robot. The aim of this paper is to present the design and development of the new robot that will be used for the next competitions. The development of the robot is part of a multidisciplinary. This chapter introduces an autonomous humanoid robot, TWNHR-IV (Taiwan Humanoid Robot-IV), which is able to play sports, such as soccer, basketball, weight lifting, and marathon. The robot is designed to be a vision-based autonomous humanoid robot for HuroSot League of FIRA Cup.

Top 15 Projects Based on Robot Chassis
Soccer is not a game, it's an attitude. Continuing from the previous video "Series of making 4 wheeled soccer bot", Team VisionBotz is here with a new video:. Understand the design features that need to be considered when designing an attachment to a robot. Materials needed. 2 or more VEX V5 Classroom Starter Kits. Roll of Tape. Meter Stick or ruler. Two small boxes for goals. Regular sized soccer or playground ball. Cones: Can use VEX competition cones, gym cones, or large cups used upside down.
Robot Soccer becomes more popular robot competition over the last decade. It is the passion of the robot fans.. In this chapter, the circuit design configuration of our soccer robot which is developed based on FPGA is introduced, including real-time control system, the function of each module, the program flow, the performance and so on.. Schematic diagram of system The RoboCup is an excellent vehicle for demonstrating SE principles. We outline below some of the key aspects: 1) System Design and Integration The design, construction and implementation of autonomous, soccer playing robots are challenging tasks.
Survey on your experience with robotics competitions Robohub
The robot hardware design also imposes some restrictions. The main restriction is related to the two cameras in the robot.. The robot soccer behavior is itself an experiment to test the proposed behavioral architecture. Using this architecture, we have developed a complete behavior able to cope with the requirements that a RoboCup match. In the 2017 version, the soccer robot design is based on the National Indonesian Robot Competition 2017 rules [15], [16], which uses FIFA's standard futsal ball.The ball's weight is 500gr..
